|
hyPACK-2013 : Programming on Heterogeneous computing Platforms : OpencL
|
|
The Open Computing Language is a framework for writing programs that execute across heterogeneous platforms
consisting of CPUs, GPUs, and other processors. OpenCL includes a language (based on C99) for writing kernels
(functions that execute on OpenCL devices), plus APIs that are used to define and then control the
heterogeneous platform. The OpenCL provides an opportunity for developers to effectively use the multiple
heterogeneous compute resources on their CPUs, GPUs and other processors.
Developers wanted to be able to access them together, not just off load the GPU for specific tasks
and the OpenCL programming environment may address these issues. OpenCL supports wide range of
applications, ranging from embedded and consume software to HPC solutions, through a low-level,
high-performance, portable abstraction. It is expected that OpenCL will form the foundation layer
of a parallel programming Eco-system of platform-independent tools, middle-ware, and applications.
|
List of Programs
|
Example 3.1
|
Write a OpenCL Program for implementation of solution of Partial Differential Equations (PDEs)
based on Finite Difference Method
( Assignment)
|
|
Example 3.2
|
Write a OpenCL Program for implementation of solution of Partial Differential Equations (PDEs)
based on Finite Difference Method using AMD APP BLAS routines
( Assignment)
|
|
Example 3.3
|
Write a Program for implementation of Laplacian Edge Detection algorithm - Image Processing
on multiple device-GPUs. ( Assignment)
|
Example 3.4
|
Write a OpenCL Program for implementation of solution of Partial Differential Equations (PDEs)
based on Finite Element Method ( Assignment)
|
|
Example 3.5
|
Write a OpenCL Program for implementation of solution of Partial Differential Equations (PDEs)
based on Finite Difference Method using multiple-GPUs ( Assignment)
|
|
Example 3.6
|
Write a OpenCL Program for implementation of String Search (Boyer-Moore) algorithm
( Assignment)
|
| |
|
|
OpenCL Programs for Application Kernels
|
|
Example 3.1: |
Write OpenCL program to obtain Solution of Poisson Equation
(Partial differential
Equations) by Finite Difference Method using simple Decomposition of Mesh.
|
- Objective
Write a OpenCL program to solve the Poisson equation
with Dirichlet boundary conditions in two space
dimensions by finite difference method on structured rectangular type of grid. Use Jacobi iteration
method to solve the discretized equations.
- Description
In the Poisson problem, the FD method is imposed a regular
grid on the physical domain. The resuting disretized equations are solved
using Jacobi Itertaive method. The description of the problem is discussed
in Example 3.2
|
|
Example 3.2: |
Write OpenCL program to obtain Solution of Poisson Equation
(Partial differential
Equations) by Finite Difference Method using One
Dimensional Decomposition of Mesh.
|
- Objective
Write a OpenCL program to solve the Poisson equation with Dirichlet boundary conditions in two space
dimensions by finite difference method on structured rectangular type of grid. Use Jacobi iteration
method to solve the discretized equations.
- Description
In the Poisson problem, the FD method is imposed a regular
grid on the physical domain. It then approximate the derivative of unknown
quantity u at a grid point by the ratio of the difference in u
at two adjacent grid points to the distance between the grid point.
In a simple situation, consider a square domain discretized by n
x n grid points, as shown in the Figure 1(a). Assume that the
grid points are numbered in a row-major order fashion from left to right
and from top to bottom, as shown in the Figure 1(b). This ordering is
called natural ordering . Given a total of n2
points in the domain n x n grid, this numbering scheme
labels the immediate neighbors of point i on the top, left, right,
and bottom point as i - n, i -1, i +1 and i+n ,
respectively. Figure 1(b) represents partitioning of mesh using one dimensional partitioning
Figure 1(a). Finite difference grid: Five point stencil approximation
Figure 1(b). One dimensional decomposition for 2-D problem, with n=7
- Formulation of Poisson Problem
The Poisson problem is expressed by the equations
Lu = f(x, y) in the interior of domain [0,1] x [0,1]
Where L is Laplacian operator in two space dimensions.
u(x,y) = g(x,y) on the boundary of the domain [0,1] x [0,1]
We define a square mesh (also called a grid) consisting
of the points (xi , yi), given by
xi = i / n+1, i=0,
..., n+1,
yj = j / n+1, j=0, ...,n+1,
where there are n+2 points along each edge of the mesh. We will
find an approximation to u(x , y) only at the points (xi,
yj). Let ui, j be the approximate solution
to u at (xi, yj). and let h =
1/(n+1). Now, we can approximate at each of these points
with the formula
(ui-1, j +ui,
j+1+ui, j-1+ui+1,
j-4ui, j )/ h2
= fi, j .
Rewriting the above equation as
ui, j = 1/4(ui-1,
j+ui, j+1+ui, j-1+ui+1,
j-h2fi, j),
Jacobi iteration method is employed to obtain final solution starting
with initial guess solution ui,jk for k=0
for all mesh points u i,j and solve the following
equation iteratively until the solution is converged.
ui, jk+1
= 1/4(ui-1, jk+ui,
j+1k+ui, j-1k+ui+1,
jk-h2fi, j).
The resultant discretized banded matrix is shown in the Figure 2.

- Implementation:
Two implementations have been done, one using kernels written in CUDA and the other using CUBLAS library.
The steps in both implementations are the same, only the API may differ.
Step1: Four arrays are required for computation, one for the storing old values of U i.e Uold, one for the storing
new values of U i.e Unew and one each for the storing difference between these two and storing the index values of the
interior points. Memory for these are allocated on the Host and they are initialized.
Step2:Four more similar arrays are allocated on the GPU (device). The values of the arrays in the host
machine are copied on to the arrays allocated on the device.
Step3: We begin the computation with an initial solution of all zero's for the Uold vector
in the first iteration and then apply boundary conditions on both Uold and Unew by setting the boundary values at corresponding positions.
Step4: We compute the Unew values by
ui, j = 1/4(ui-1, j +
ui, j+1 +
ui, j-1 +
ui+1, j)
Step5: Next we compute the difference between Unew and Uold.
Step6: We assign Unew to Uold
Step7: The values thus obtained (Uold) is used in the next iteration and steps 4,5,6 are repeated until
Maximum difference value < TOLERANCE or present iteration equals Maximum iterations.
All computations are done on GPU(device).
Important Steps :
|
Steps
|
Description
|
|
1.
|
Memory allocation on host and Input data Generation
Allocate memory for input arrays to read mesh data, boundary data and iterative method for solution
of poisson equation on host-CPU.
|
|
2.
|
Set opencl execution environment :
Call the function setExeEnv which sets execution environment for opencl
which performs the following :
- Get Platform Information
- Get Device Information
- Create context for GPU-devices to be used
- Create program object.
- Build the program executable from the program source.
The function performs
(a). Discover & Initilaise the platforms;
(b). Discoer & Initialie the devices;
(c). Create a Context; and
(d). Create program object build the program executable
|
|
3.
|
Create command queue using
Using clCreateCommandQueue(*)
and associate it with the device you want to execute on.
|
|
4.
|
Create device bufffer
using device_buffer that will contain the data from
the host_buffer.
|
|
5.
|
Write host-CPU data to device buffers
:
Use
clEnqueueWriteBuffer
|
|
6.
|
Kernel Launch :
(a). Create kernel handle;
(b). Set kernel arguments;
(c). Configure work-item strcture ( Define global and local worksizes and launch kernel for
execution on device-GPU); and
(d). Enqueue the kernel for execution
|
|
7.
|
Read the output Buffer to the host (Copy result from
Device-GPU to host-CPU )
Use
clEnqueueReadBuffer() API.
|
|
8.
|
Check correctness of result on host-CPU
Compute solution of Iterative method on host-CPU and compare CPU and GPU results.
|
|
9.
|
Release OpenCL resources (Free the memory)
Free the memory of arrays allocated on host-CPU & device-GPU
|
- Input
The input to the problem is given as arguments in the command line. It should be given in the following format ;
Suppose that the number of points in the X direction is m, the number of points in the Y direction is n and
the maximum number of iterations the program can is run is p, then the program must be run as,
./program_name m n p
CPU assigns the boundary values for the Uold and Unew vectors.
- Output
CPU prints the final Unew vector which is the solution to the Poisson equation with the above stated boundary values
|
|
Example 3.3: |
Write OpenCL program for Lapalce Edge Detection Algorithm
|
- Objective
Write a OpenCL program to implement Laplace Edge Detection
algorithm on AMD-APP GPU with MPI as host-CPU Programming. Assignment
- Description
The Laplacian image kernel is a 3 x3 two-dimensional array and this kernel is applied
to each pixel in the image and takes into account the pixel's neighbors in a 3 x 3 area around it.
The organization of multidimensional thread blocks of images into multidimensional grids are
required for CUDA development to process the of arrays of data in typical edge detection algorithm.
This representation of data in these forms are usually best suited for migration to CUDA for processing.
Such data types include images that can be represented as a two-dimensional matrix where each entry corresponds
to a single pixel in the image. An image pixel consists of a discrete red, green, and blue component in
the range [0 . . . 255].
We create a two-dimensional grid that is overlaid on the image, segmenting it into several rectangular
sections, as illustrated in Figure 1. For simplicity, we assume the image can be evenly divided into
full sized segments. In other words, the image is divided into thread blocks of 8 x 8 and 16 x 16 sizes.
Each thread within the thread block corresponds to a single pixel within the image. In implementation,
each thread is responsible for loading one pixel or the block of 3 x 3 pixel area into shared memory

Figure 1(a). Thread blocks for single pixel per thread method
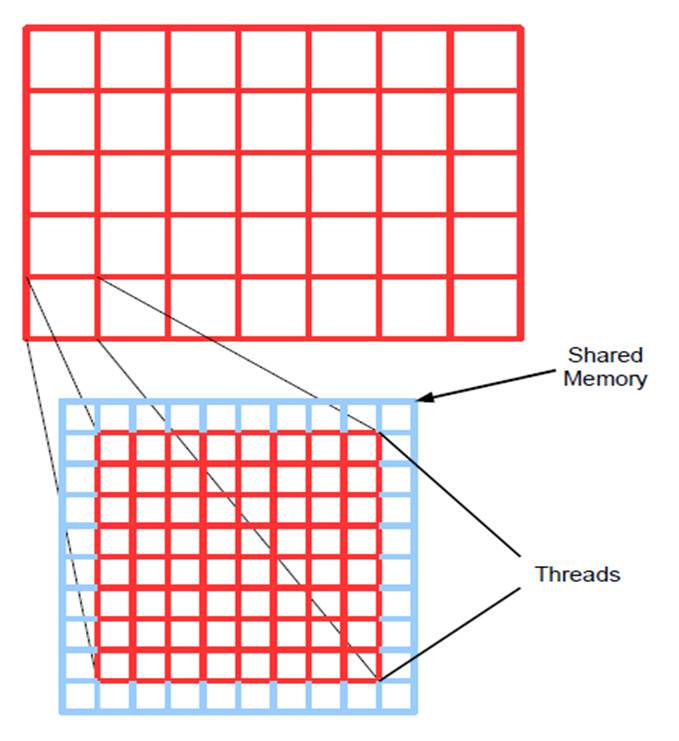
Figure 1(b). Thread blocks for multiple pixels
For edge detection, the each target pixel requires that a 3x3 area surrounding pixels and these are
analyzed to calculate the output. Therefore, threads on the edge of a thread block must examine pixels
that are outside the dimensions of the thread block. In order to ensure accuracy of the output image,
these threads are responsible for loading the pixels they are adjacent to that do not have a mapping in
the thread block into shared memory.
That is, the threads on the edge of the block load the boundary pixels into shared memory. This
extra step is performed after the initial shared memory load that all threads perform. To compensate
for the required extra space, the two-dimensional shared memory array is allocated to have dimensions
of (blockDim.x+2, blockDim.y+2). This allocates two additional rows and two additional columns of
shared memory. Once the block has loaded its respective section of the target image into shared memory,
a syncthreads() function is called so that the threads can re-group before proceeding.
For each thread in the thread-block, we apply the convolution kernel for target pixel which is at
the center element and the 3x3 pixel group. After applying the convolution formula, we obtain correct
pixel value. Once the OpenCL kernel has finished executing, the allocated memory within the GPU is freed
and the program exits.
To develop a OpenCL parallel algorithm for Laplacian edge detection, two
OpenCL work-items,
while the second took a new approach in an attempt to increase efficiency within CUDA thread blocks.
|
|
|
|
